il robot

La FLL (First Lego League) è una gara internazionale di scienze e robotica. Questa competizione mira a sviluppare e a promuovere l'inventiva, la capacità di collaborare con i propri compagni e con le altre squadre. In questa gara non si pone freno all'immaginazione, purché le idee che ne derivano siano attinenti al tema dato dagli organizzatori, che è diverso ogni anno. Una parte della competizione comprende lo sviluppo e la promozione di un progetto scientifico, inerente al tema dell'anno; l'altra parte consiste in una gara di robotica. Per maggiori info sulla competizione in corso, clicca qui.
Durante la gara di robotica il robot deve svolgere in 2 minuti e mezzo alcune "missioni" poste su un campo di gara. Il robot va programmato al PC con un software basato su icone semplici ed intuitive (scaricabile sul sito della LEGO, sezione Mindstorm), non può essere telecomandato.
Durante la gara di robotica il robot deve svolgere in 2 minuti e mezzo alcune "missioni" poste su un campo di gara. Il robot va programmato al PC con un software basato su icone semplici ed intuitive (scaricabile sul sito della LEGO, sezione Mindstorm), non può essere telecomandato.

Il robot è composto da un mattoncino intelligente, il "cervello" che gestisce i programmi e ordina ai motori e sensori cosa devono fare, permettendo al robot di muoversi sul campo di gara.
Può gestire al massimo 4 motori; noi ne abbiamo di due tipi:
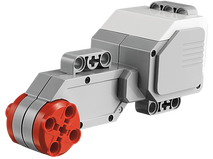
-il motore "large" (nell'immagine a lato) che con la sua forma è adatto alla trazione del robot, in quanto è in grado di generare molta potenza.
-il motore "large" (nell'immagine a lato) che con la sua forma è adatto alla trazione del robot, in quanto è in grado di generare molta potenza.

- il "medium" invece è adatto per muovere piccoli bracci, in quanto non possiede molta potenza, ma le sue piccole dimensioni lo rendono facilmente posizionabile all'interno del robot.
Ma non è finita qui! Il robot deve sapere cosa c'è attorno a lui, la sua posizione nello spazio, la sua angolazione rispetto ai bordi del campo, la luminosità circostante, etc.... A raccogliere tutti questi dati ci pensano i sensori. Ce ne sono di vari tipi: luce, ultrasuoni, contatto e giroscopio sono i principali, nonché i più utili.
-Il sensore di luce (1) è in grado di misurare la luminosità e captare i colori.
-Il sensore a ultrasuoni (2) è in grado di misurare la distanza tra il robot e il più vicino oggetto di fronte a lui.
-Il sensore di contatto (3) è in grado di percepire la pressione su di esso.
-Il sensore giroscopio (4) misura gli angoli e quindi può essere usato dal robot per eseguire curve molto precise o per capire se sta deviando dalla traiettoria.
-Il sensore di luce (1) è in grado di misurare la luminosità e captare i colori.
-Il sensore a ultrasuoni (2) è in grado di misurare la distanza tra il robot e il più vicino oggetto di fronte a lui.
-Il sensore di contatto (3) è in grado di percepire la pressione su di esso.
-Il sensore giroscopio (4) misura gli angoli e quindi può essere usato dal robot per eseguire curve molto precise o per capire se sta deviando dalla traiettoria.

|

|

|

|
1 2 3 4
